Self-Learning
Note: I developed this project as part of a challenge project suggested by Dr. Alfredo Canziani in my Deep Learning course at New York University. I took the initial code that sets up a simulated environment from here. I designed and developed the training process of two models: one that is responsible for imagining what the state of the agent would look like in the next step if it takes a specific action, and another model for determining which action should be taken in the next step to reach the target. I also integrated a curriculum learning process for both models to ensure that the agent starts learning from simple tasks first, before jumping to more difficult tasks. At the end of the process, the agent learned to plan and take the right sequence of actions to reach the target point on its own without any supervision or data collection, even when it was randomly initialized outside the training zone. The training process, the agent’s behavior before and after the training, and the instructions for how to run the code are explained below.
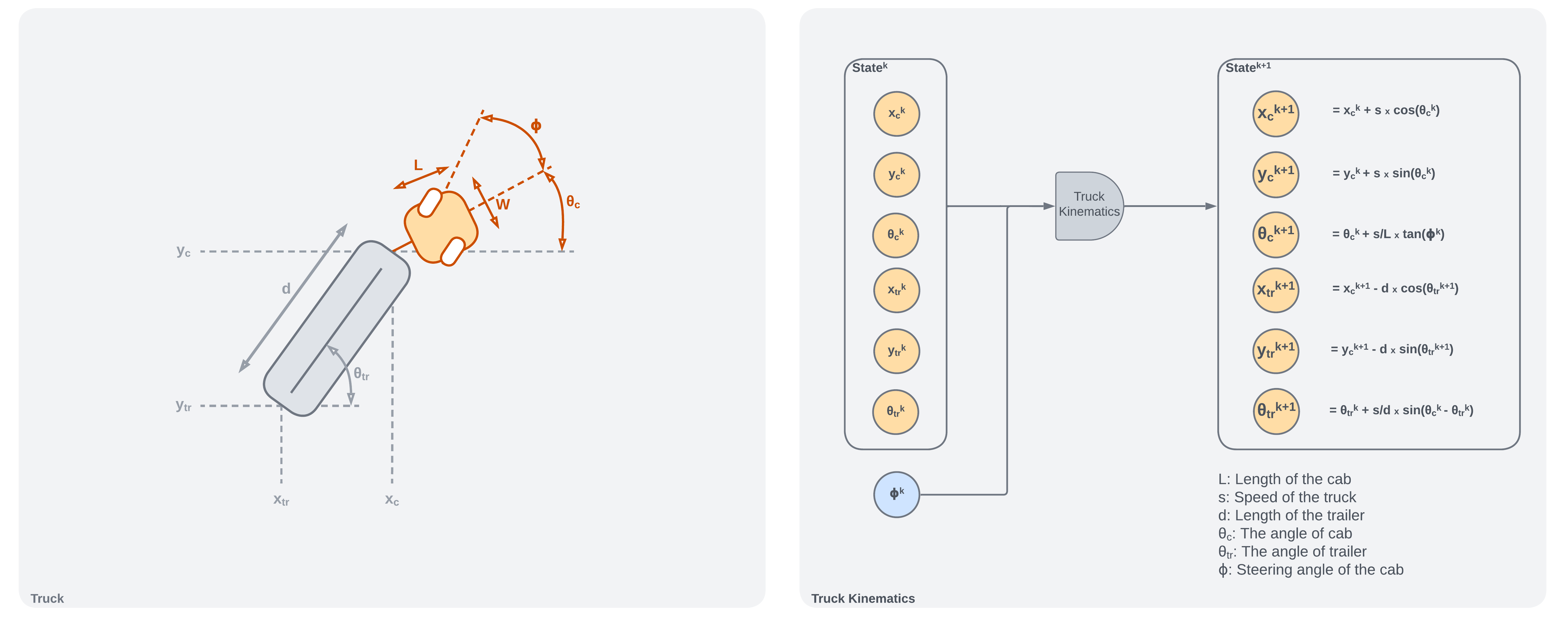
Truck Kinematics
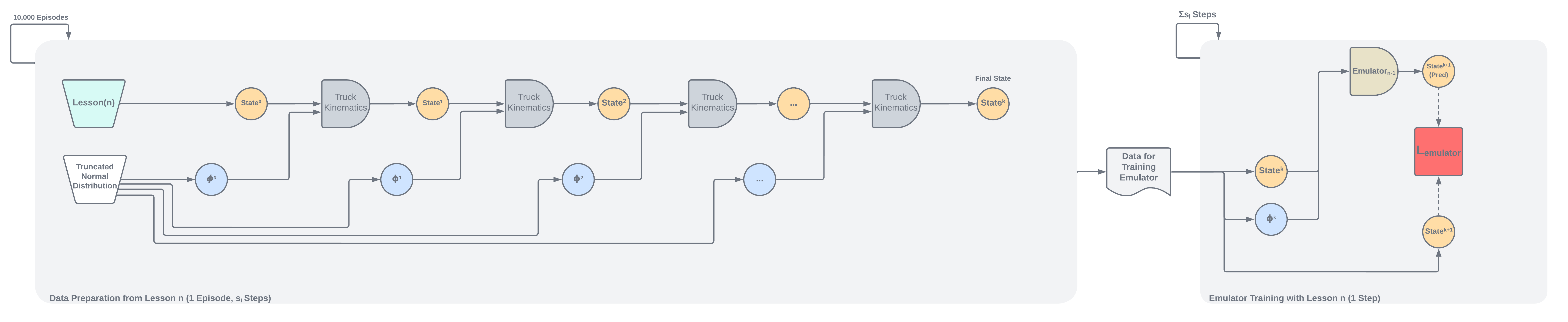
Training Emulator
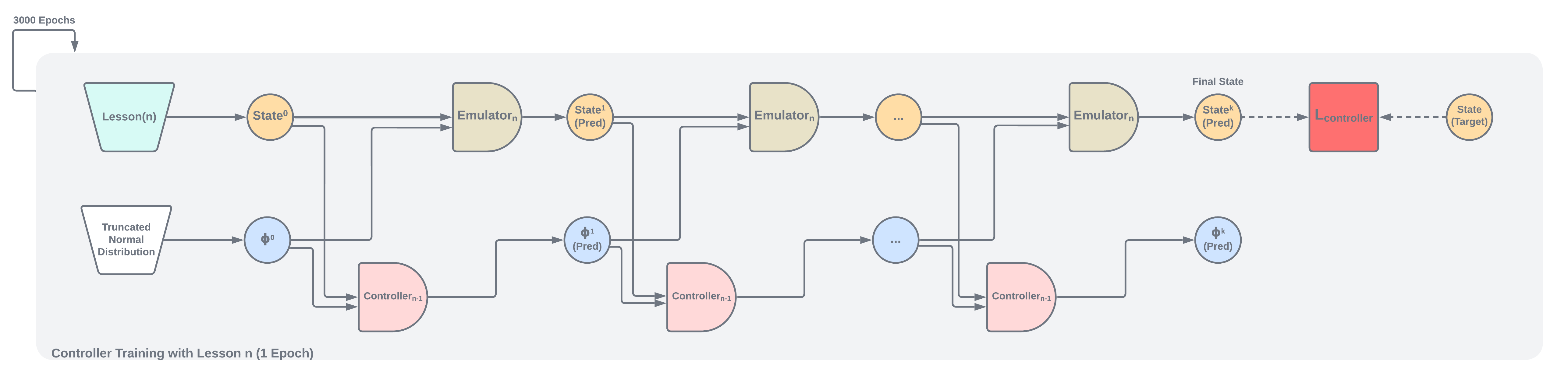
Training Controller
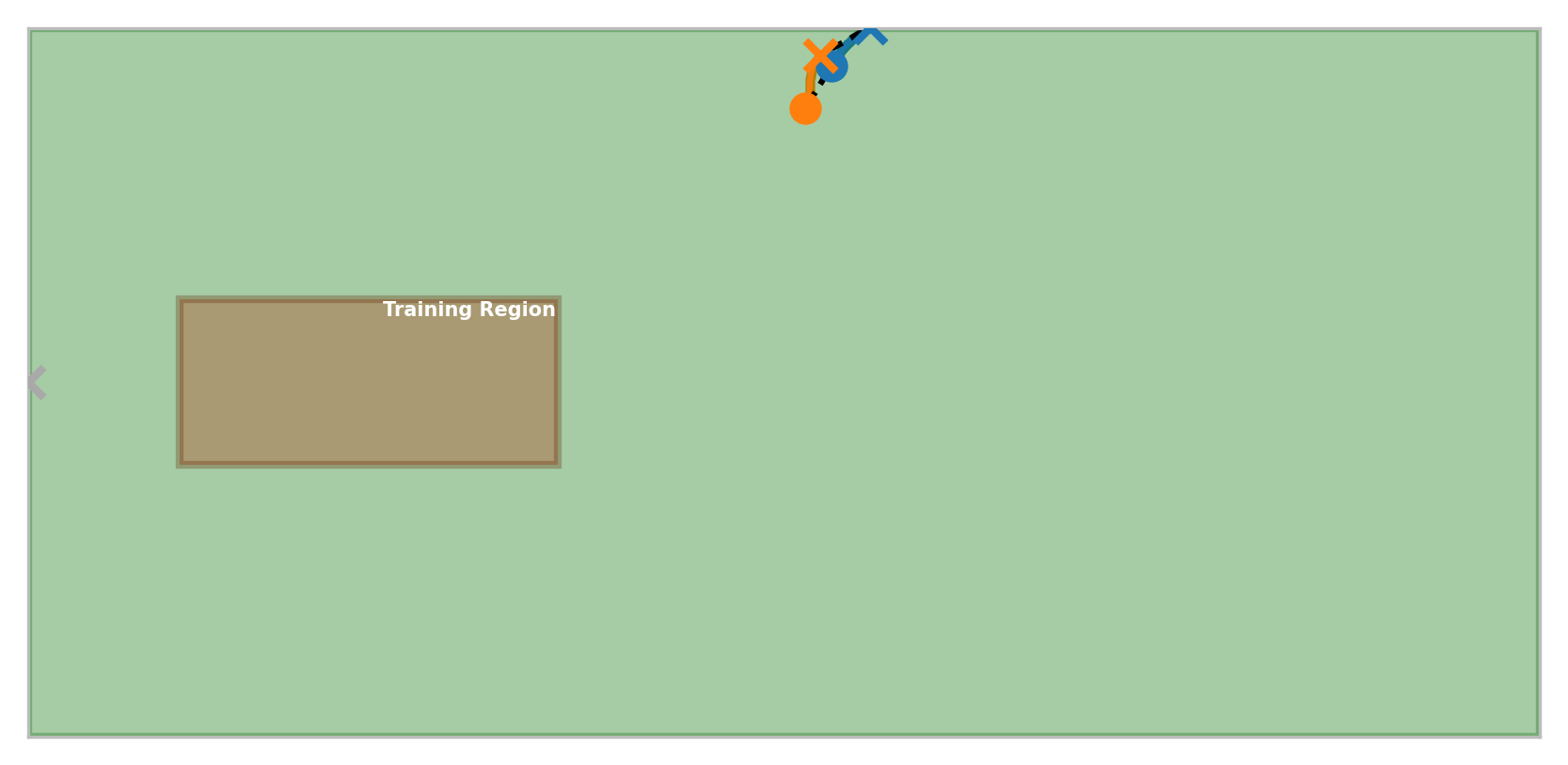
Simulation Before Training
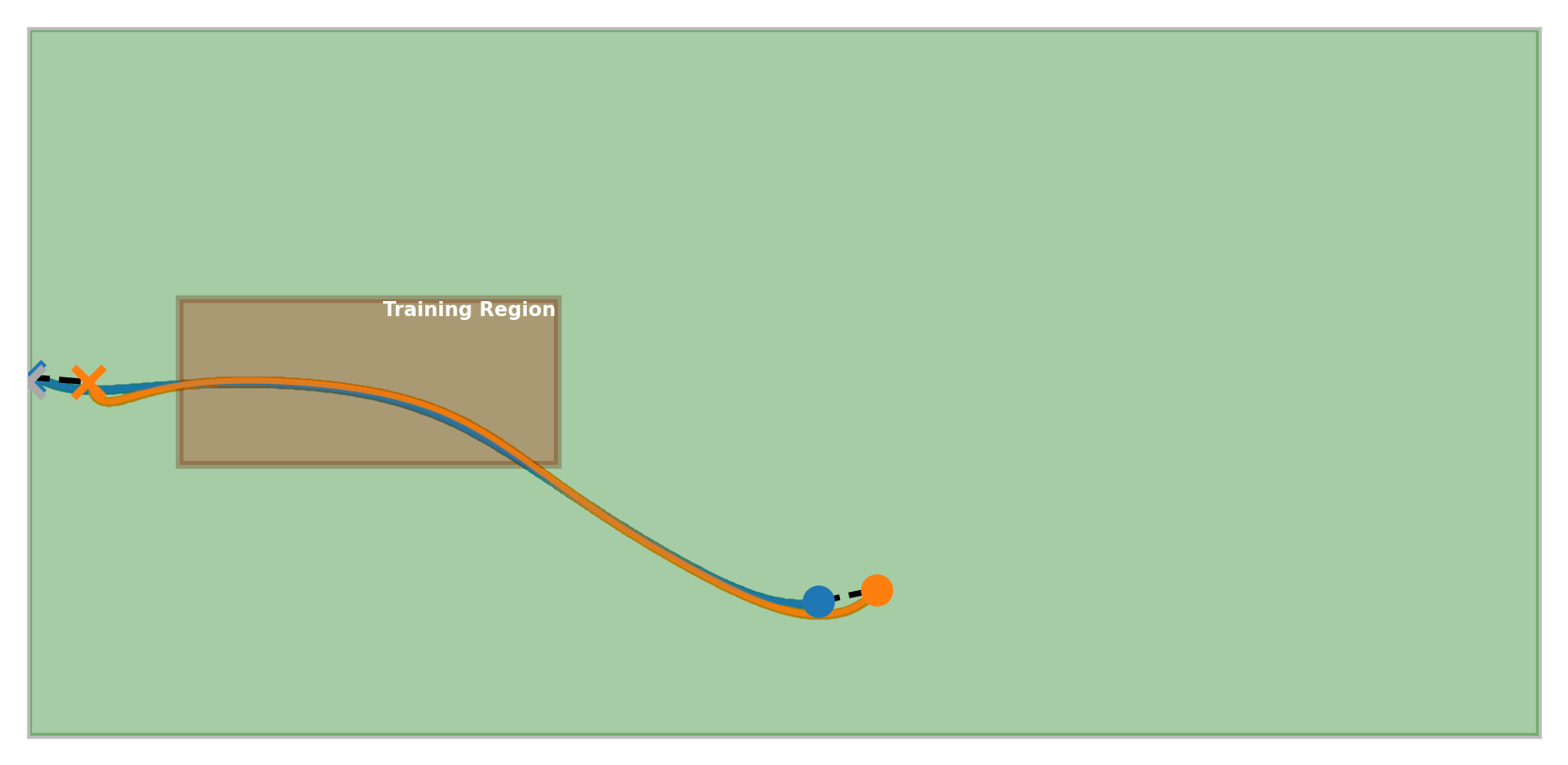
Simulation After Training
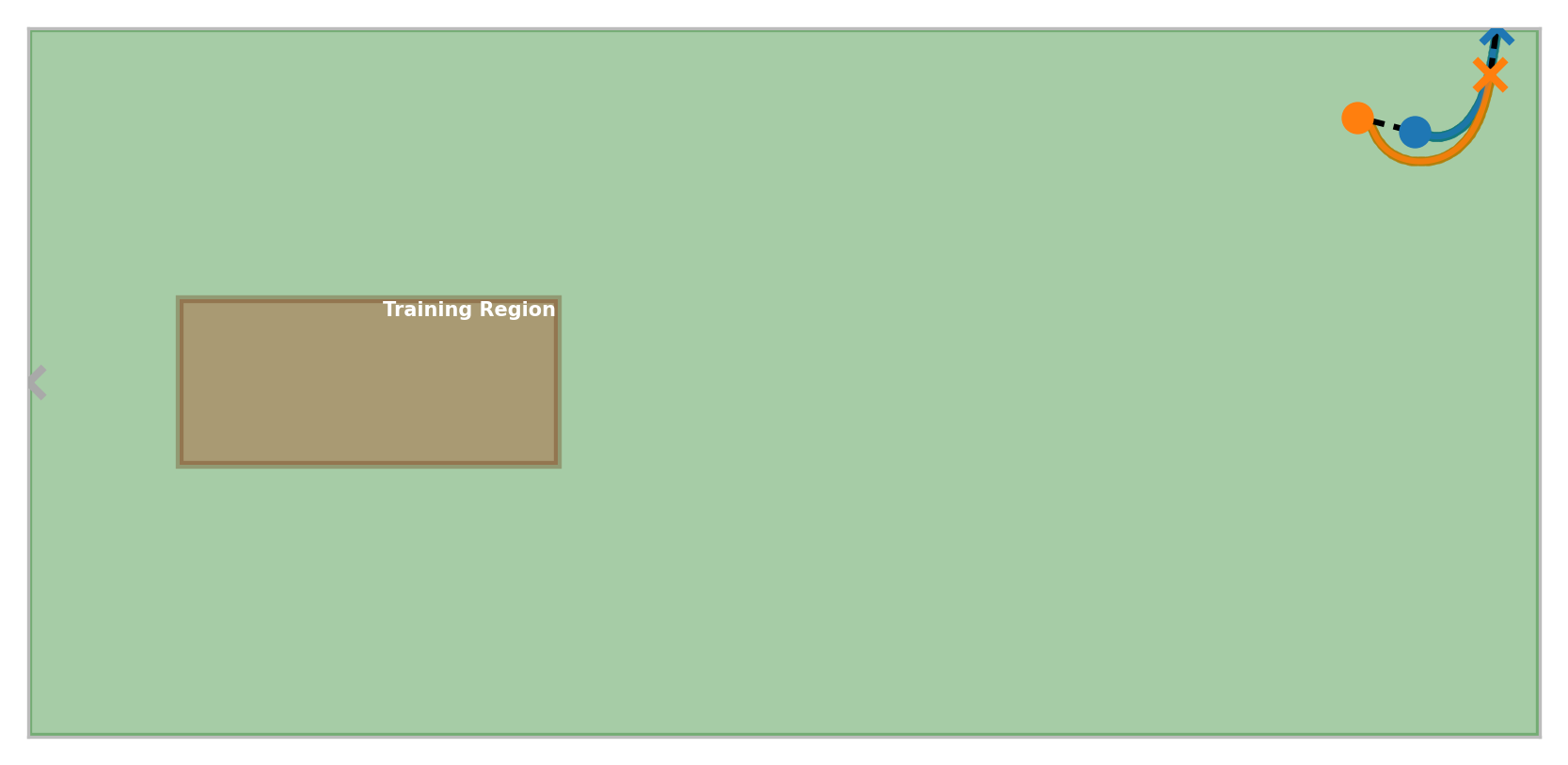
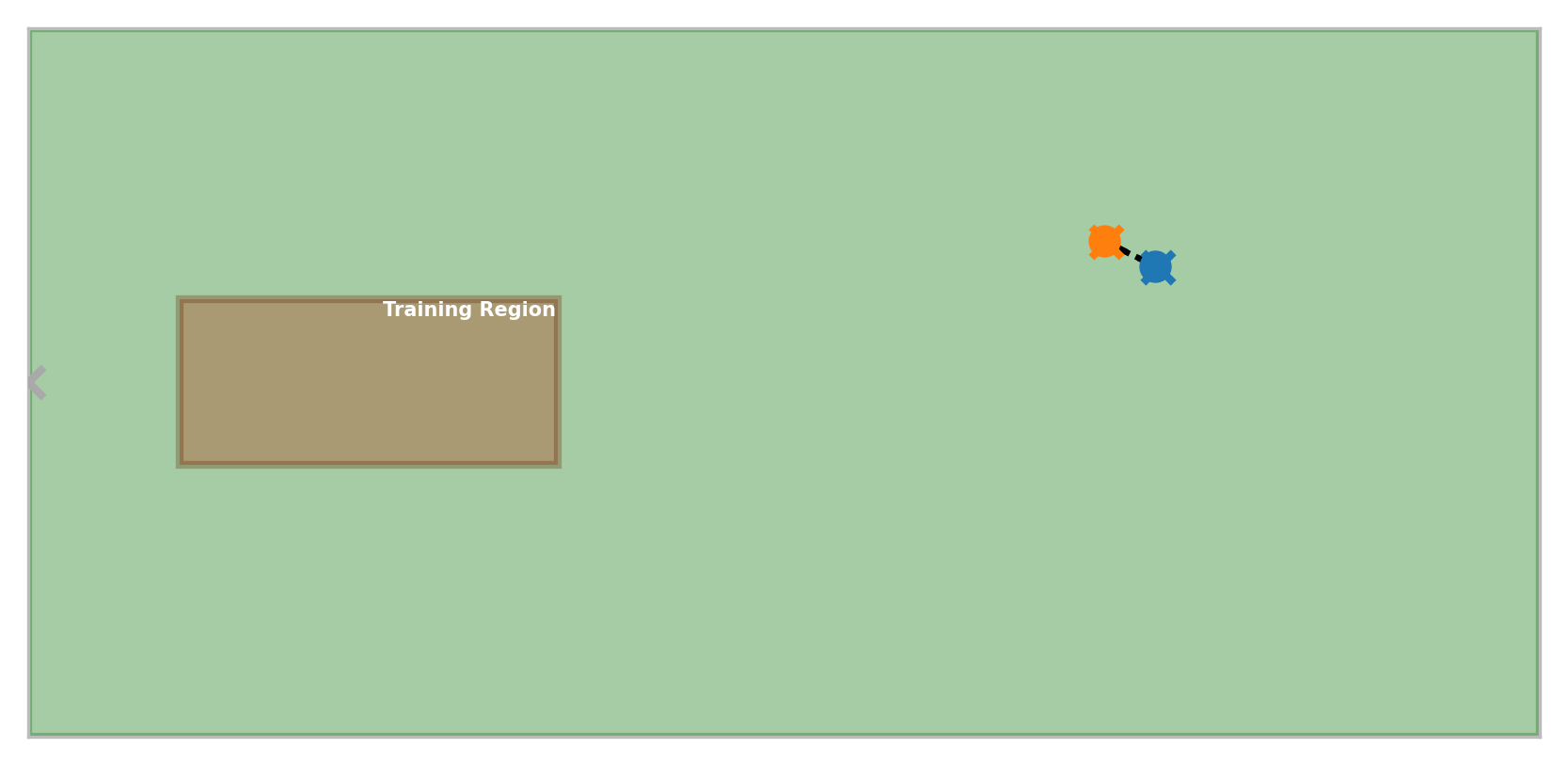
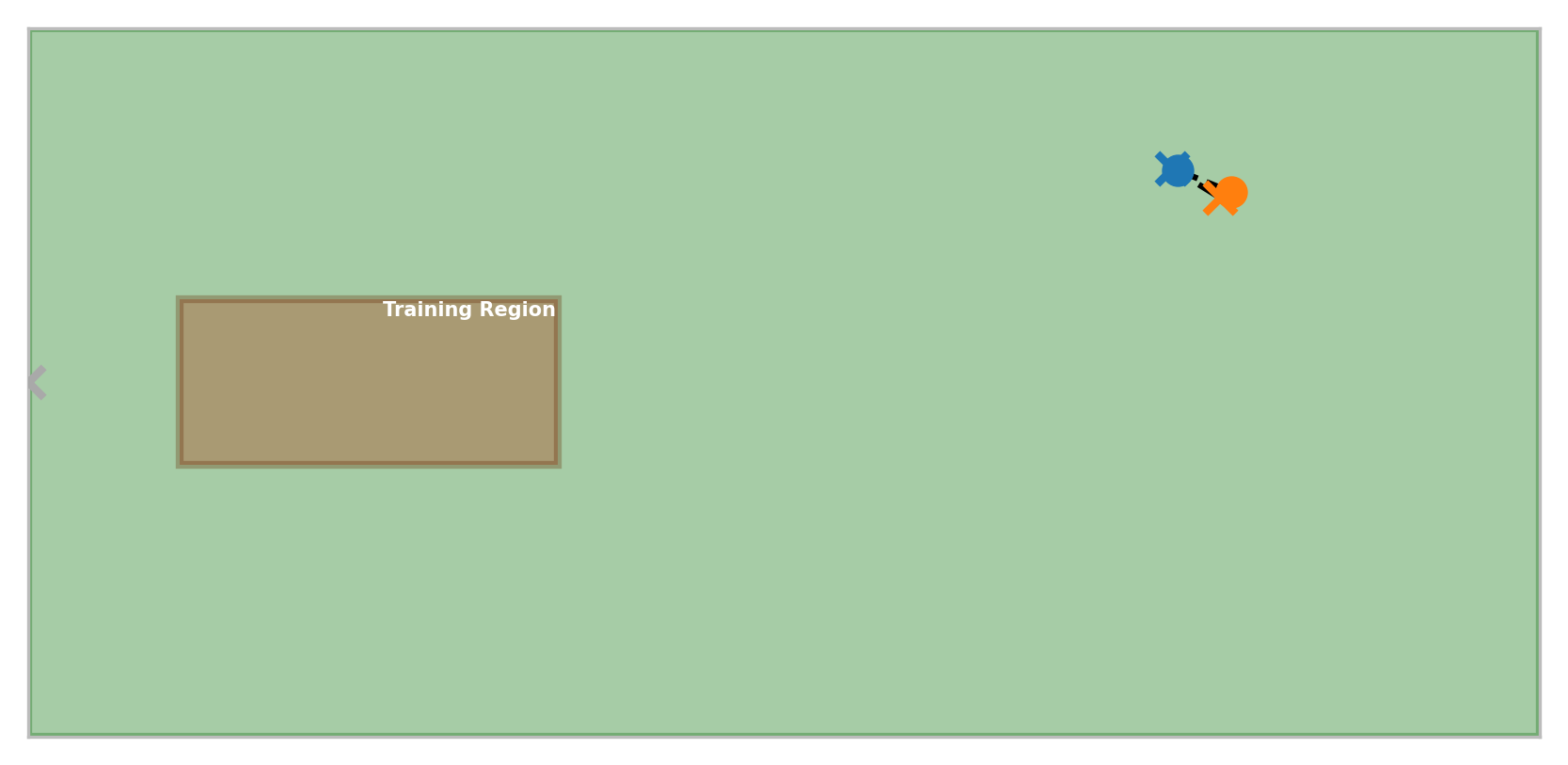
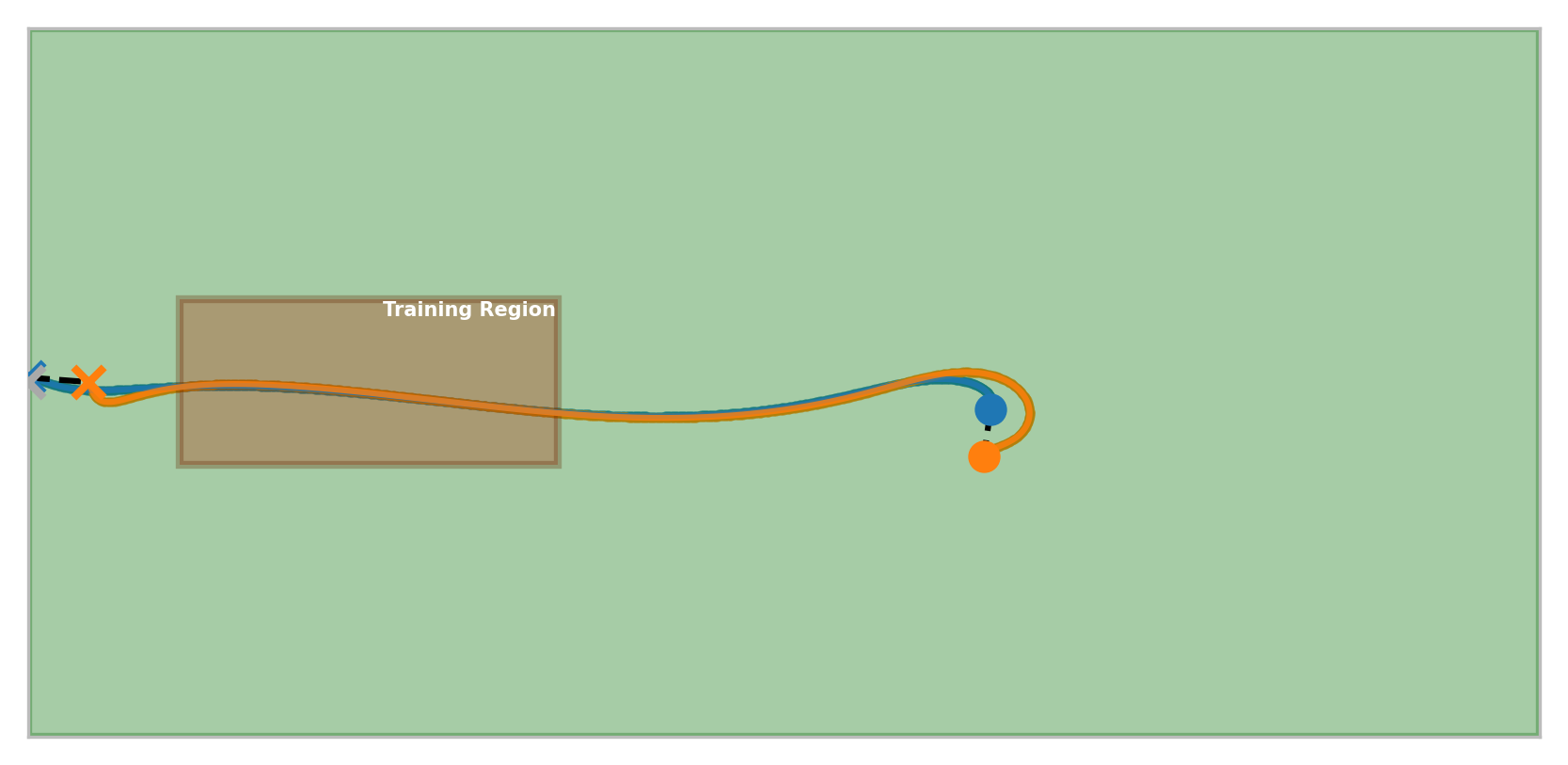
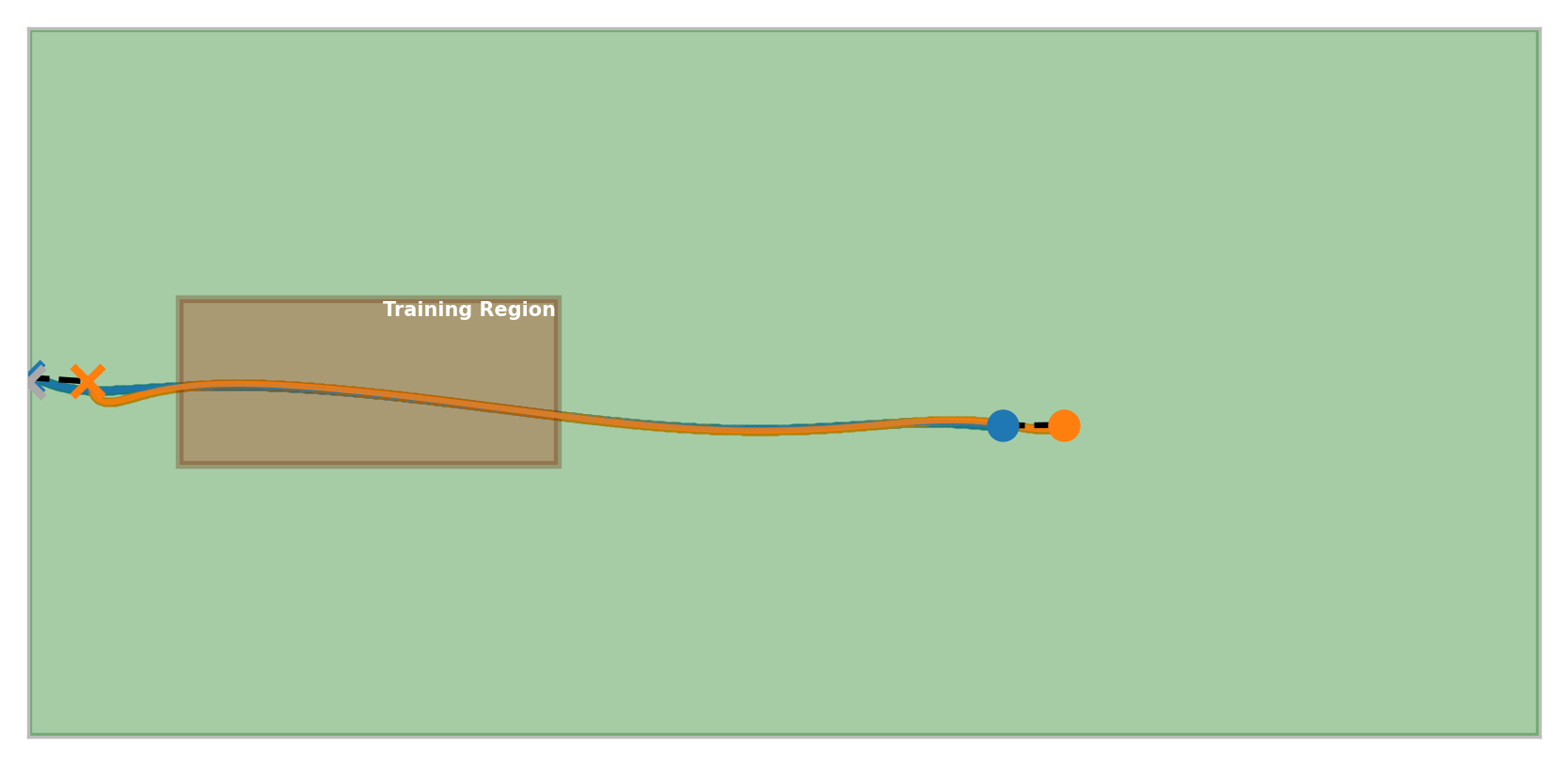
Simulation Beyond Training Boundaries
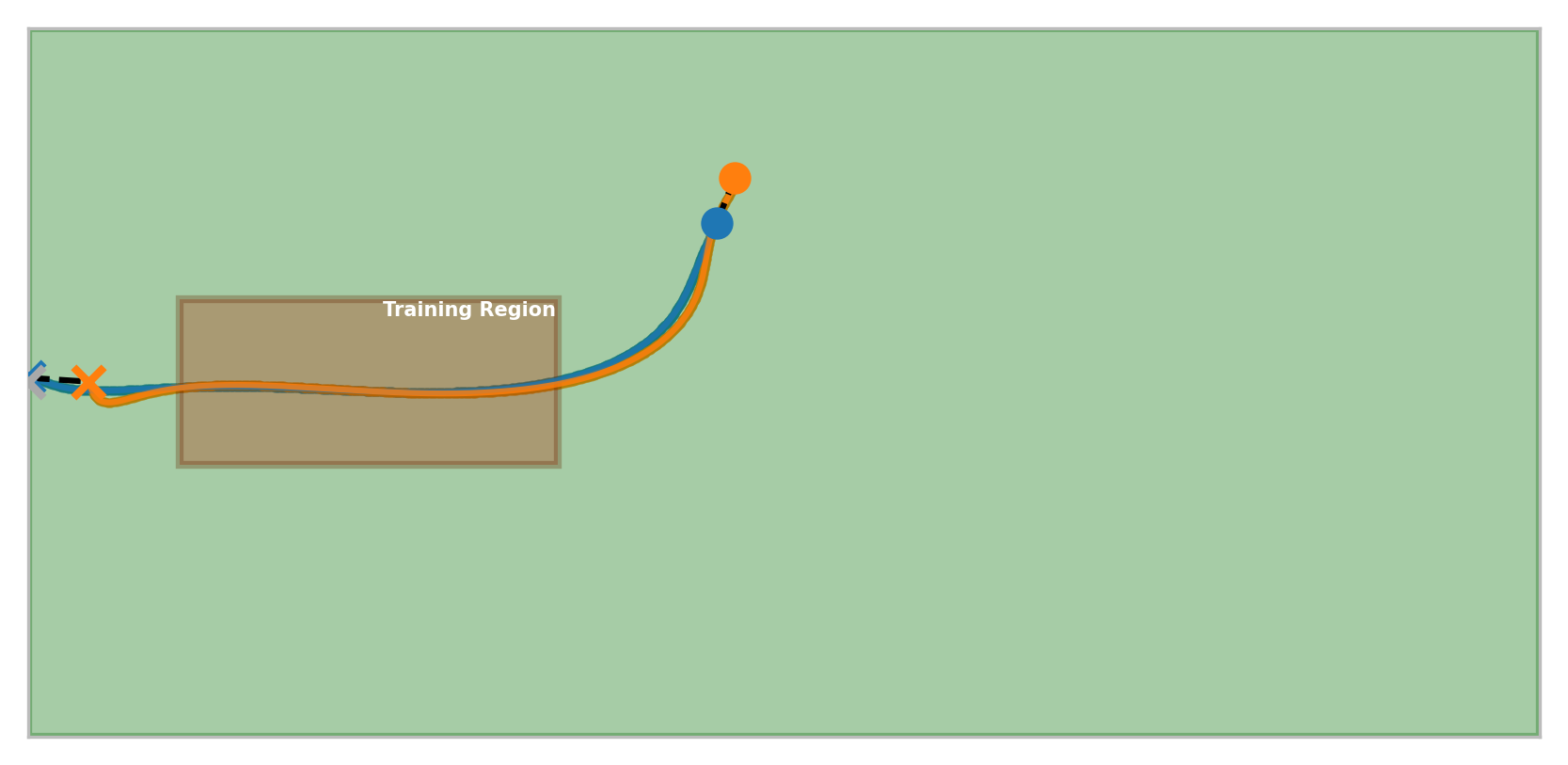
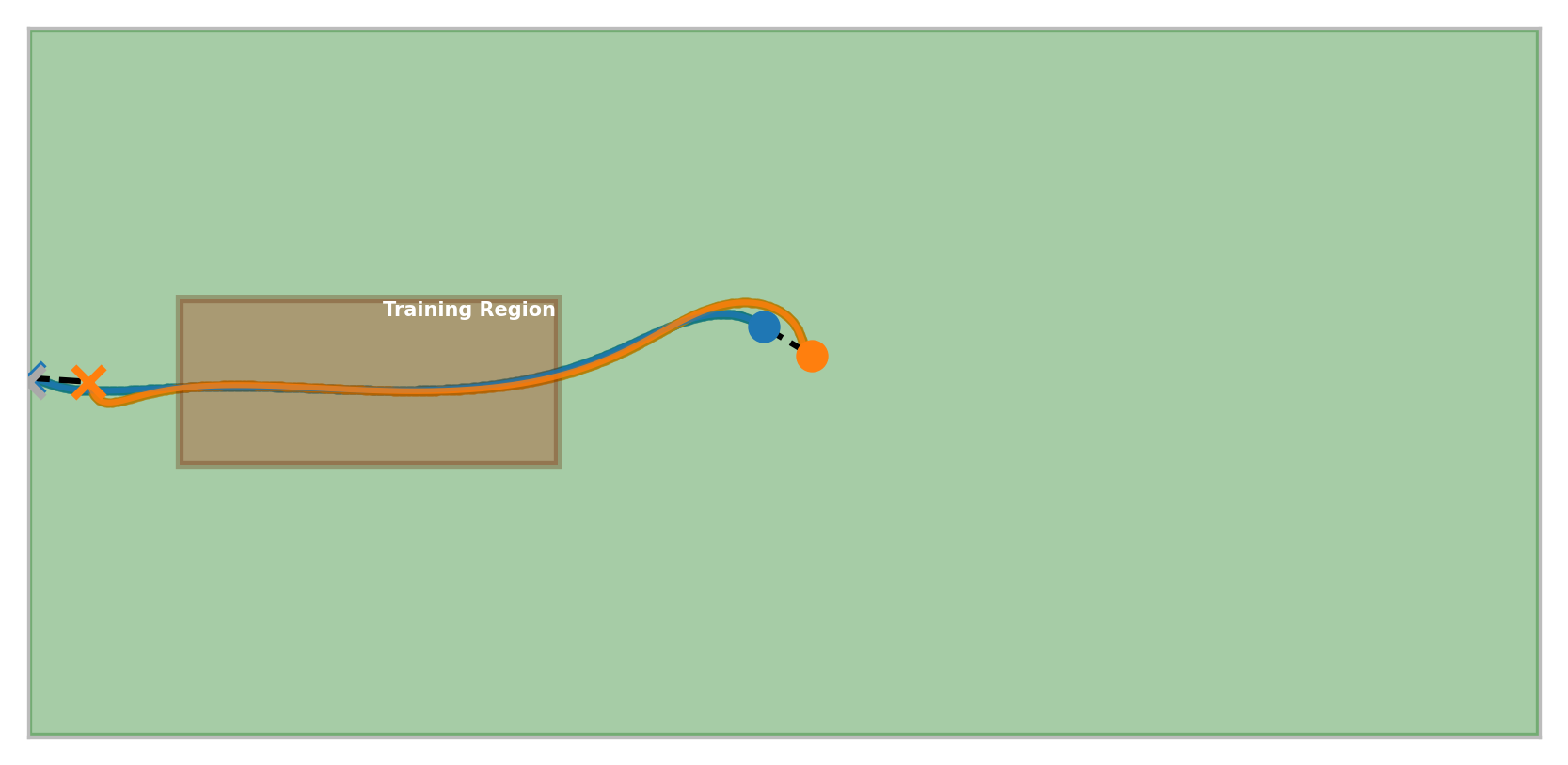
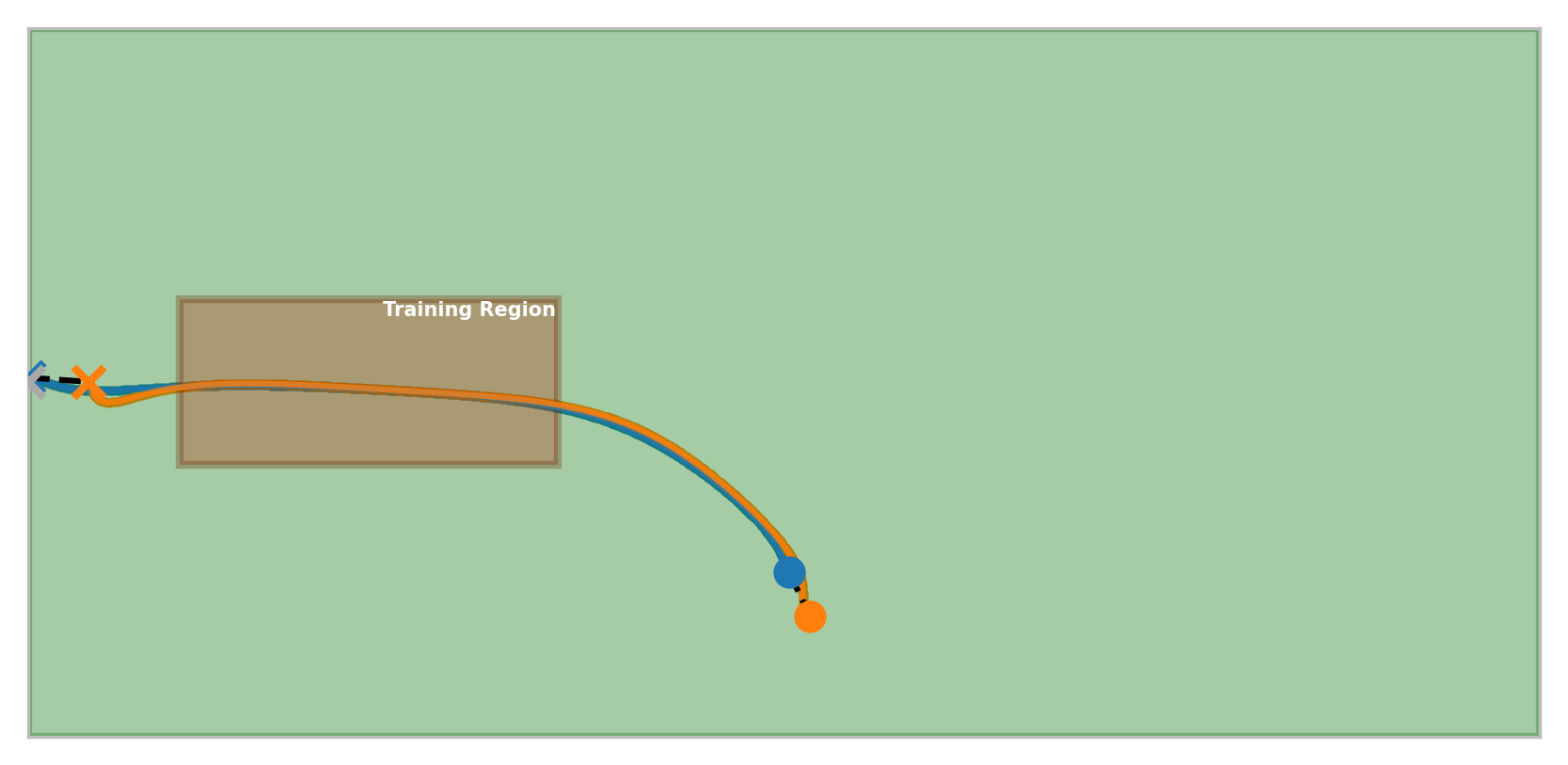
Trajectories
Run the Simulation
Create and activate the conda environment with:
conda env create -f conda_env.yaml
conda activate truck_backer_upper
To test the models inside the training region, run:
python truck-backer-upper.py
To test the models outside the training region, run:
python truck-backer-upper.py\
--env_x_range 0 100\
--env_y_range -30 30\
--test_x_cab_range 40 90\
--test_y_cab_range -25 25
To train both emulator and controller models, run:
python truck-backer-upper.py --train_emulator True
To train only controller models, run:
python truck-backer-upper.py --train_controller True
References
-
Nguyen, D., & Widrow, B. (1989). The truck backer-upper: an example of self-learning in neural networks. In International 1989 Joint Conference on Neural Networks (pp. 357–363, vol. 2). https://doi.org/10.1109/IJCNN.1989.118723
-
Schoenauer, M., & Ronald, E. (1994). Neuro-genetic truck backer-upper controller. In Proceedings of the First IEEE Conference on Evolutionary Computation. IEEE World Congress on Computational Intelligence (pp. 720–723, vol. 2). https://doi.org/10.1109/ICEC.1994.349969